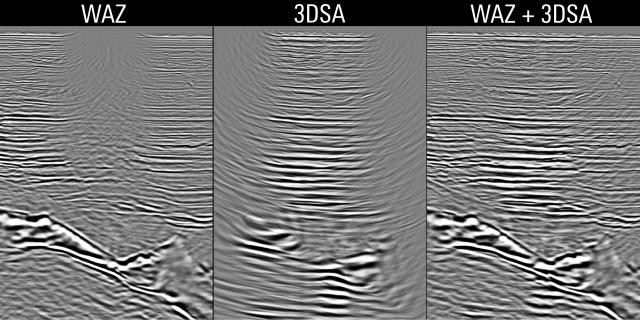
The combination of WAZ data (left) and 3DSA data (middle) shows that using AMV towing 3DSA is a good and economical solution to acquire the missing near-offset data (right) around obstructions. (Source: Schlumberger)
The use of autonomous marine vehicles (AMVs) for offshore oil and gas activity continues the trend of exploiting robotics technology to support safety, lower costs, and improved data acquisition and quality. In particular, AMVs combined with a 3-D sensor array (3DSA) have proven effective for seismic acquisition in many environments and operating conditions to complement the proven towed streamer technology. These applications include shallow water, infill around obstructions as close as 100 m (330 ft), environmentally sensitive areas such as coral reefs, acquisition of long-offsets as long as 30 km (18.6 miles), rough terrain, deep water—to avoid using an ROV—and acquisition of full-azimuth data for velocity model-building.
Recent field tests conducted offshore Abu Dhabi and in the Green Canyon area of the Gulf of Mexico show comparable data quality between data acquired with the 3DSA platform and data acquired by other methods like towed streamer, ocean-bottom nodes (OBN) or ocean-bottom cables (OBC).
AMV design
The AMV used in seismic application comprises a surface float and a subsurface glider connected by an umbilical. The propulsion system works on a combination of wave and mechanical energy and thus requires no onboard fuel. As the surface float rises on the crest of a wave, the vertical wave motion is transferred via the umbilical to the glider section. This causes the glider’s wings to move up and down, which provides constant forward motion. The surface float includes solar panels and a battery, GPS and a communication link, a vertical management computer, and a mini-acquisition system for acquiring and storing high-density seismic data.
AMVs can be programmed to receive commands via satellite from a pilot in an onshore operations center. Typically, they can hold station simulating a “floating node,” and once acquisition is complete, the entire fleet can be ordered to move to the next position through a series of waypoints. Based on survey type, AMVs can either be held in a grid formation or a receiver line every few hundred feet apart. While the AMV used in this survey was wave-powered, other AMVs are coming on the scene that use other forms of energy such as wind, solar and battery power.
The 3DSA consists of 15 hydrophones (three in each of five arms) mounted on a 1.5-m (5-ft) frame. A buoyancy engine ensures the array is oriented and does not rotate on its axis while moving through the water. The buoyancy engine also houses inertial motion sensors consisting of three-axis accelerometers, a gyroscope and a magnetic depth sensor. Seismic data are organized in common receiver gathers and, typically, the sum of the 15 individual hydrophone measurements per shot point is processed.
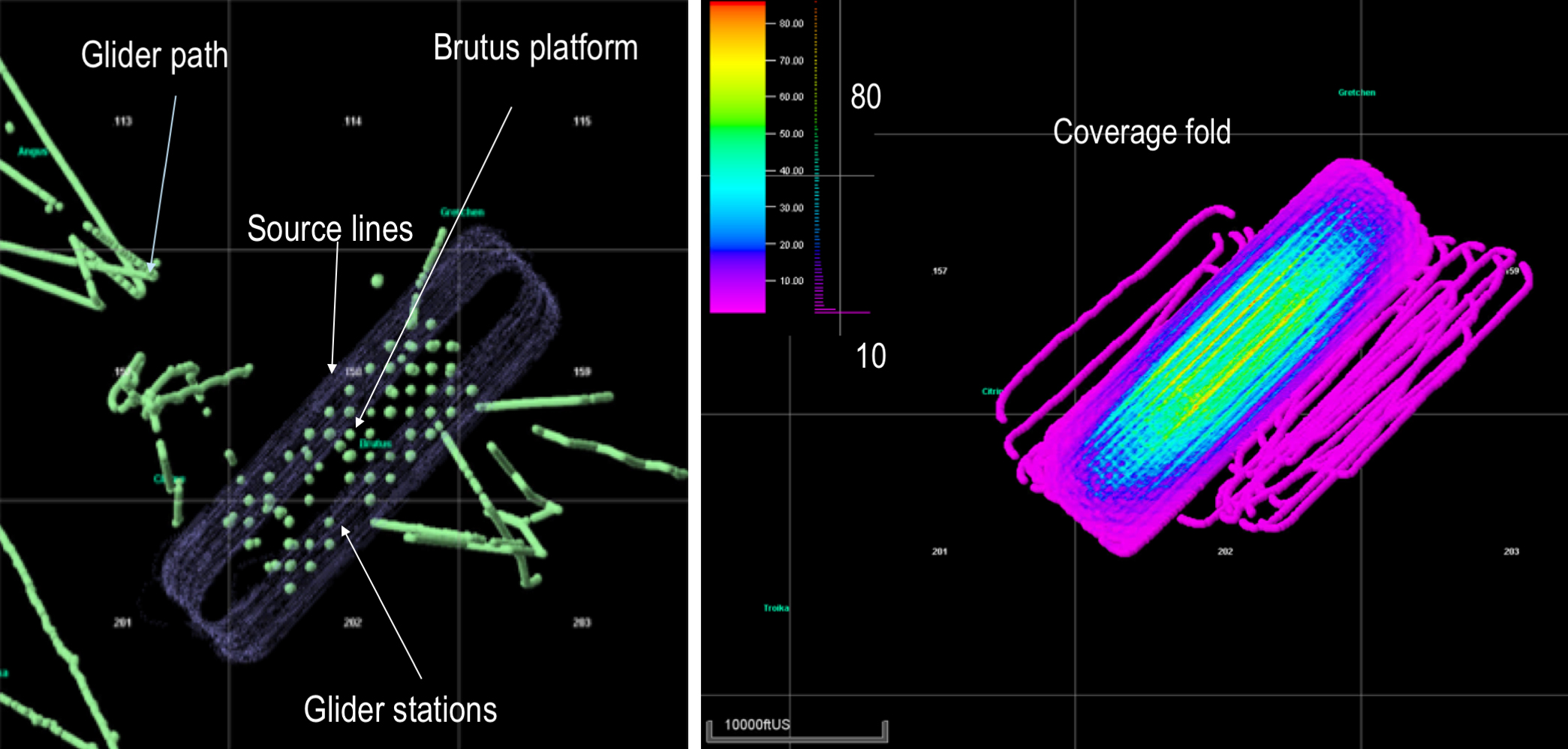
The picture on the left shows the position of the AMV (green) and shot locations (violet). The picture on the right shows the fold of coverage. Data were acquired with 20 AMVs and a source vessel that shot every 25 m (82 ft, flip-flop). (Source: Schlumberger)
Shallow-water acquisition offshore Abu Dhabi
A field test of an AMV with 3DSA in shallow water offshore Abu Dhabi evaluated the safety during deployment, retrieval of the system and its operational performance; its ability to hold station and depth; and data quality compared to data acquired by an ongoing OBC survey. Because the water depth in this area averages 20 m (66 ft), towed streamer acquisition is seldom used, and acquisition is by OBN or OBC. Three systems were deployed within a 400-m (1,312-ft) square area on top of a previous OBC survey area. Data were acquired over eight days. The quality of the data acquired was comparable to that of the OBC data. The ability of the system to hold station, the performance of the recording system, and the safe deployment and retrieval of the systems were successfully proven and documented in this field test.
Green Canyon
The Green Canyon field test evaluated the ability of the AMV and 3DSA system to acquire data around surface obstructions and to acquire long-offset data. Seventeen AMVs, each towing a 3DSA, were deployed around several platforms. A support vessel transported all 17 systems. At the prospect location the ship’s crane lowered the 3DSA over the side, and then the glider and platform were deployed. Each deployment was completed in about 30 minutes, and total deployment time was under 8 hours.
Real-time displays from the navigation management system enabled monitoring of vehicle positions in different configurations. Initially, the AMV and 3DSA stations were within a 300-m-by-300-m (984-ft-by-984-ft) grid pattern. Single- and multiple-source vessels shot around the AMV spread. In another configuration, 10 AMV and 3DSA systems were positioned 20 km (12 miles) away from a wide-azimuth (WAZ) coil survey to collect long-offset data.
This acquisition proved the ability of the system to acquire data within the 500-m (1,640-ft) exclusion zone for vessels around an obstruction. This gives the industry an excellent technique to acquire high-resolution undershoot data very close to obstructions like platforms and rigs since this cannot be done safely, efficiently and cost-effectively using towed surveys. Often the same source boat can be deployed to get data response and seismic images from both the towed streamer outside the exclusion zone and the 3DSA fleet inside the exclusion zone.
Other applications
Outside of seismic applications, the systems have been successfully used to collect metocean and turbidity data, to detect hydrocarbon leaks, to obtain geomagnetic measurements for accurate well placement, to transmit acoustic data from subsea and deepwater assets and to record behaviors of marine life.
The use of an AMV system increases the safety envelope for offshore operations. Personnel and vessels are needed only for deployment, recovery and maintenance. The sensor vehicle is unmanned during missions, and there is reduced risk during high sea states. Reduced need for costly vessels, the lower overall logistical/planning burden and the elimination of an onboard fuel requirement all contribute to lowering operational costs. Finally, the AMV provides a persistent sensor platform that avoids downtime for bad weather.
To date, 40 such projects have been conducted for various applications for 19 clients, including nine repeat clients clocking 3,976 days at sea. This includes eight seismic surveys. These surveys have been conducted from Alaska in the west to Australia in the east and the Arctic in the north to southern Latin America.
Recommended Reading
AI-Shale Synergy: Experts Detail Transformational Ops Improvements
2025-01-17 - An abundance of data enables automation that saves time, cuts waste, speeds decision-making and sweetens the bottom line. Of course, there are challenges.
Trump Administration to Open More Alaska Acres for Oil, Gas Drilling
2025-03-20 - U.S. Interior Secretary Doug Burgum said the agency plans to reopen the 82% of Alaska's National Petroleum Reserve that is available for leasing for development.

Energy Technology Startups Save Methane to Save Money
2025-03-28 - Startups are finding ways to curb methane emissions while increasing efficiency—and profits.

E&P Highlights: March 3, 2025
2025-03-03 - Here’s a roundup of the latest E&P headlines, from planned Kolibri wells in Oklahoma to a discovery in the Barents Sea.

Digital Twins ‘Fad’ Takes on New Life as Tool to Advance Long-Term Goals
2025-02-13 - As top E&P players such as BP, Chevron and Shell adopt the use of digital twins, the technology has gone from what engineers thought of as a ‘fad’ to a useful tool to solve business problems and hit long-term goals.
Comments
Add new comment
This conversation is moderated according to Hart Energy community rules. Please read the rules before joining the discussion. If you’re experiencing any technical problems, please contact our customer care team.